Hypersimplex
In polyhedral combinatorics, a hypersimplex, Δd,k, is a convex polytope that generalizes the simplex. It is determined by two parameters d and k, and is defined as the convex hull of the d-dimensional vectors whose coefficients consist of k ones and d − k zeros. It forms a (d − 1)-dimensional polytope, because all of these vectors lie in a single (d − 1)-dimensional hyperplane.[1]
 |
 |
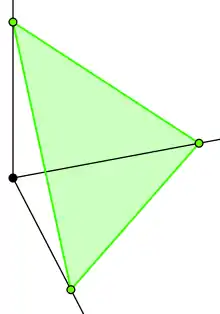
| (3,1) Hyperplane: x + y + z = 1 |
(3,2) Hyperplane: x + y + z = 2 |
|---|
Properties
The number of vertices in Δd,k is .[1]

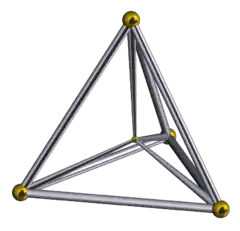
The graph formed by the vertices and edges of a hypersimplex Δd,k is the Johnson graph J(d,k).[2]
Alternative constructions
An alternative construction (for k ≤ d/2) is to take the convex hull of all (d − 1)-dimensional (0,1)-vectors that have either (k − 1) or k nonzero coordinates. This has the advantage of operating in a space that is the same dimension as the resulting polytope, but the disadvantage that the polytope it produces is less symmetric (although combinatorially equivalent to the result of the other construction).
A hypersimplex Δd,k is also the matroid polytope for a uniform matroid with d elements and rank k.[3]
Examples
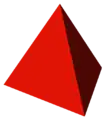
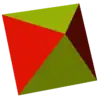
The hypersimplex with parameters (d,1) is a (d − 1)-simplex, with d vertices. The hypersimplex with parameters (4,2) is an octahedron, and the hypersimplex with parameters (5,2) is a rectified 5-cell.
Generally, every (k,d)-hypersimplex, Δd,k, corresponds to a uniform polytope, being the (k − 1)-rectified (d − 1)-simplex, with vertices positioned in the centers of all (k − 1)-face elements of a (d − 1)-simplex.
| Name | Equilateral triangle |
Tetrahedron (3-simplex) |
Octahedron | 5-cell (4-simplex) |
Rectified 5-cell |
5-simplex | Rectified 5-simplex |
Birectified 5-simplex |
|---|---|---|---|---|---|---|---|---|
| Δd,k = (d,k) = (d,d − k) |
(3,1) (3,2) |
(4,1) (4,3) |
(4,2) | (5,1) (5,4) |
(5,2) (5,3) |
(6,1) (6,5) |
(6,2) (6,4) |
(6,3) |
| Vertices |
3 | 4 | 6 | 5 | 10 | 6 | 15 | 20 |
| d-coordinates | (0,0,1) (0,1,1) |
(0,0,0,1) (0,1,1,1) |
(0,0,1,1) | (0,0,0,0,1) (0,1,1,1,1) |
(0,0,0,1,1) (0,0,1,1,1) |
(0,0,0,0,0,1) (0,1,1,1,1,1) |
(0,0,0,0,1,1) (0,0,1,1,1,1) |
(0,0,0,1,1,1) |
| Image |  |
 |
 |
 |
 |
|||
| Graphs |  J(3,1) = K2 |
 J(4,1) = K3 |
 J(4,2) = T(6,3) |
 J(5,1) = K4 |
 J(5,2) |
 J(6,1) = K5 |
 J(6,2) |
 J(6,3) |
| Coxeter diagrams |
||||||||
| Schläfli symbols |
{3} = r{3} |
{3,3} = 2r{3,3} |
r{3,3} = {3,4} | {3,3,3} = 3r{3,3,3} |
r{3,3,3} = 2r{3,3,3} |
{3,3,3,3} = 4r{3,3,3,3} |
r{3,3,3,3} = 3r{3,3,3,3} |
2r{3,3,3,3} |
| Facets | { } | {3} | {3,3} | {3,3}, {3,4} | {3,3,3} | {3,3,3}, r{3,3,3} | r{3,3,3} | |
History
The hypersimplices were first studied and named in the computation of characteristic classes (an important topic in algebraic topology), by Gabrièlov, Gelʹfand & Losik (1975).[4][5]
References
- Miller, Ezra; Reiner, Victor; Sturmfels, Bernd, Geometric Combinatorics, IAS/Park City mathematics series, 13, American Mathematical Society, p. 655, ISBN 9780821886953.
- Rispoli, Fred J. (2008), The graph of the hypersimplex, arXiv:0811.2981, Bibcode:2008arXiv0811.2981R.
- Grötschel, Martin (2004), "Cardinality homogeneous set systems, cycles in matroids, and associated polytopes", The Sharpest Cut: The Impact of Manfred Padberg and His Work, MPS/SIAM Ser. Optim., SIAM, Philadelphia, PA, pp. 99–120, MR 2077557. See in particular the remarks following Prop. 8.20 on p. 114.
- Gabrièlov, A. M.; Gelʹfand, I. M.; Losik, M. V. (1975), "Combinatorial computation of characteristic classes. I, II", Akademija Nauk SSSR, 9 (2): 12–28, ibid. 9 (1975), no. 3, 5–26, MR 0410758.
- Ziegler, Günter M. (1995), Lectures on Polytopes, Graduate Texts in Mathematics, 152, Springer-Verlag, New York, p. 20, doi:10.1007/978-1-4613-8431-1, ISBN 0-387-94365-X, MR 1311028.
Further reading
- Hibi, Takayuki; Solus, Liam (2014), Facets of the r-stable n,k-hypersimplex, arXiv:1408.5932, Bibcode:2014arXiv1408.5932H.