Programmable Universal Machine for Assembly
The PUMA (Programmable Universal Machine for Assembly, or Programmable Universal Manipulation Arm) is an industrial robotic arm developed by Victor Scheinman at pioneering robot company Unimation. Initially developed for General Motors, the PUMA was based on earlier designs Scheinman invented while at Stanford University.
Unimation produced PUMAs for years until being purchased by Westinghouse (ca. 1980), and later by Swiss company Stäubli (1988). Nokia Robotics manufactured about 1500 PUMA robots during the 1980s, the Puma-650 being their most popular model with customers. Some own Nokia Robotics products were also designed, like Nokia NS-16 Industrial Robot or NRS-15[1] . Nokia sold their Robotics division in 1990.
{kind=link}
In 2002, General Motors Controls, Robotics and Welding (CRW) organization donated the original prototype PUMA robot to the Smithsonian Institution's National Museum of American History. It joins a collection of historically important robots that includes an early Unimate and the Odetics Odex 1.[2]
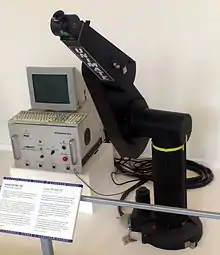
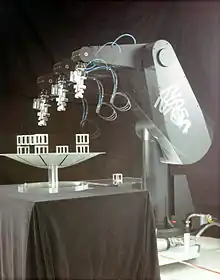
The essence of the design is represented in three categories; 200, 500, and 700 series. The 200 series is a smaller desktop unit. Notably, this model was used for the first robotic stereotactic brain biopsy in 1985. The 500 Series and can reach almost 2 meters up. This model is the more popular design and is the most recognizable configuration. The 700 series is the largest of the group and was intended for assembly line, paint, and welding work.
All designs consist of two main components: the mechanical arm and the control system. These are typically interconnected by one or two large multi-conductor cables. When two cables are used, one carries power to the servo motors and brakes while the second carries the position feedback for each joint back to the control system.
The control computer is based on the LSI-11 architecture which is very similar to PDP11 computers. The system has a boot program and basic debug tool loaded on ROM chips. The operating system is loaded from external storage through a serial port, usually from a floppy disk.
The control unit also contains the servo power supply, analog and digital feedback processing boards, and servo drive system.
Model 260
- Six-axis arm with 3 axis making up a spherical wrist
- Maximum reach 400 mm from center axis to center of wrist
- Maximum payload: 2.2 kg
- Arm weight: 13.2 kg
- Repeatability ±0.05 mm
- max velocity: 1245 mm/sec straight line moves
| Joint maximums | Degrees |
|---|---|
| Waist | 315 |
| Shoulder | 320 |
| Elbow | 300 |
| Wrist bend | 236 |
| Wrist roll | 575 |
| Tool flange | 525 |
Model 560 C
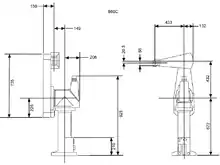
- 6 Axis arm with 3 axis making up a spherical wrist.[4]
- Maximum reach 878mm from center axis to center of wrist [4]
- Software selectable payloads from 4 kg to 2.5 kg [4]
- Arm weight: 83 kg (approximate)[5]
- Repeatability ±0.1mm[6]
- 2.5 kg max velocity: 500mm/sec straight line moves [6]
- 4.0 kg max velocity: 470mm/sec straight line moves [6]
| Joint Maximums [7] | Degrees |
|---|---|
| Waist | 320 |
| Shoulder | 266 |
| Elbow | 284 |
| Wrist Bend | 200 |
| Wrist Roll | 280 |
| Tool Flange | 532 |
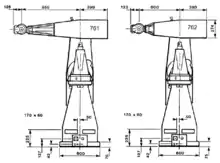
Model 761 and 762
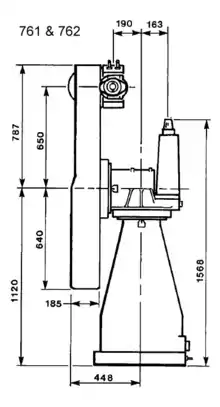
- 6 Axis arm with 3 axis making up a spherical wrist.
- Maximum reach
761: 1.50m from center axis to center of wrist
762: 1.25m from center axis to center of wrist[9]
- Arm mass:
761: 600 kg [9] 762: 590 kg [9]
- Payload:
761: 10 kg[10] 762: 20 kg [10]
| Joint Maximums [12] | Degrees |
|---|---|
| Waist | 320 |
| Shoulder | 220 |
| Elbow | 270 |
| Wrist Bend | 200 |
| Wrist Roll | 532 |
| Tool Swivel | 600 |
Control system
References
- "Nokia robotics". Fabryka robotow. Retrieved 8 May 2013.
- PUMA Robot Becomes Part of American History at the Smithsonian Robotics Online, archived on February 28, 2008 from the original
- "Robot 560 C Arm Manual" Staubli Unimation ltd. 1990 {C340.005.05.A} ch.2 pg.3
- "Robot 560 C Arm Manual" Staubli Unimation ltd. 1990 {C340.005.05.A} ch.1 pg.1
- "Robot 560 C Arm Manual" Staubli Unimation ltd. 1990 {C340.005.05.A} ch.1 pg.10
- "Robot 560 C Arm Manual" Staubli Unimation ltd. 1990 {C340.005.05.A} ch.1 pg.12
- "Robot 560 C Arm Manual" Staubli Unimation ltd. 1990 {C340.005.05.A} ch.1 pg.5
- "Unimate PUMA Mark III Robot 700 Series Models 761/762 Equipment Manual 398Z1" Unimation Westinghouse. 1986 ch.2 pg.4
- "Unimate PUMA Mark III Robot 700 Series Models 761/762 Equipment Manual 398Z1" Unimation Westinghouse. 1986 ch.1 pg.43
- "Unimate PUMA Mark III Robot 700 Series Models 761/762 Equipment Manual 398Z1" Unimation Westinghouse. 1986 ch.1 pg.44
- "Unimate PUMA Mark III Robot 700 Series Models 761/762 Equipment Manual 398Z1" Unimation Westinghouse. 1986 ch.1 pg.46
- "Unimate PUMA Mark III Robot 700 Series Models 761/762 Equipment Manual 398Z1" Unimation Westinghouse. 1986 ch.1 pg.24 fig 1-13
Books that Reference the PUMA design
- "Essentials of Mechatronics" Billingsley,John. John Wiley & Sons. Hoboken, NJ. 2006 ISBN 978-0-471-72341-7 Ch.9
- "Robot Modeling and Kinematics" Manseur,Rachid. DaVinci Engineering Press. Boston, MA. 2006 ISBN 1-58450-851-5 Ch.4-5
- "Robotics Technology and Flexible Automation 2nd Edition" S.R. Deb. McGraw Hill. New Delhi. 2010 ISBN 0-07-007791-6
External links
| Wikimedia Commons has media related to Programmable Universal Machine for Assembly. |