Error analysis for the Global Positioning System
The error analysis for the Global Positioning System is important for understanding how GPS works, and for knowing what magnitude of errors should be expected. The GPS makes corrections for receiver clock errors and other effects but there are still residual errors which are not corrected. GPS receiver position is computed based on data received from the satellites. Errors depend on geometric dilution of precision and the sources listed in the table below.

Overview
| Source | Effect (m) |
|---|---|
| Signal arrival C/A | ±3 |
| Signal arrival P(Y) | ±0.3 |
| Ionospheric effects | ±5 |
| Ephemeris errors | ±2.5 |
| Satellite clock errors | ±2 |
| Multipath distortion | ±1 |
| Tropospheric effects | ±0.5 |
| C/A | ±6.7 |
| P(Y) | ±6.0 |

User equivalent range errors (UERE) are shown in the table. There is also a numerical error with an estimated value, , of about 1 meter. The standard deviations, , for the coarse/acquisition (C/A) and precise codes are also shown in the table. These standard deviations are computed by taking the square root of the sum of the squares of the individual components (i.e., RSS for root sum squares). To get the standard deviation of receiver position estimate, these range errors must be multiplied by the appropriate dilution of precision terms and then RSS'ed with the numerical error. Electronics errors are one of several accuracy-degrading effects outlined in the table above. When taken together, autonomous civilian GPS horizontal position fixes are typically accurate to about 15 meters (50 ft). These effects also reduce the more precise P(Y) code's accuracy. However, the advancement of technology means that in the present, civilian GPS fixes under a clear view of the sky are on average accurate to about 5 meters (16 ft) horizontally.


The term user equivalent range error (UERE) refers to the error of a component in the distance from receiver to a satellite. These UERE errors are given as ± errors thereby implying that they are unbiased or zero mean errors. These UERE errors are therefore used in computing standard deviations. The standard deviation of the error in receiver position, , is computed by multiplying PDOP (Position Dilution Of Precision) by , the standard deviation of the user equivalent range errors. is computed by taking the square root of the sum of the squares of the individual component standard deviations.

PDOP is computed as a function of receiver and satellite positions. A detailed description of how to calculate PDOP is given in the section Geometric dilution of precision computation (GDOP).
for the C/A code is given by:

The standard deviation of the error in estimated receiver position , again for the C/A code is given by:

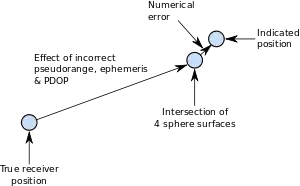
The error diagram on the left shows the inter relationship of indicated receiver position, true receiver position, and the intersection of the four sphere surfaces.
Signal arrival time measurement
The position calculated by a GPS receiver requires the current time, the position of the satellite and the measured delay of the received signal. The position accuracy is primarily dependent on the satellite position and signal delay.
To measure the delay, the receiver compares the bit sequence received from the satellite with an internally generated version. By comparing the rising and trailing edges of the bit transitions, modern electronics can measure signal offset to within about one percent of a bit pulse width, , or approximately 10 nanoseconds for the C/A code. Since GPS signals propagate at the speed of light, this represents an error of about 3 meters.

This component of position accuracy can be improved by a factor of 10 using the higher-chiprate P(Y) signal. Assuming the same one percent of bit pulse width accuracy, the high-frequency P(Y) signal results in an accuracy of or about 30 centimeters.

Atmospheric effects
Inconsistencies of atmospheric conditions affect the speed of the GPS signals as they pass through the Earth's atmosphere, especially the ionosphere. Correcting these errors is a significant challenge to improving GPS position accuracy. These effects are smallest when the satellite is directly overhead and become greater for satellites nearer the horizon since the path through the atmosphere is longer (see airmass). Once the receiver's approximate location is known, a mathematical model can be used to estimate and compensate for these errors.
Ionospheric delay of a microwave signal depends on its frequency. It arises from ionized atmosphere (see Total electron content). This phenomenon is known as dispersion and can be calculated from measurements of delays for two or more frequency bands, allowing delays at other frequencies to be estimated.[1] Some military and expensive survey-grade civilian receivers calculate atmospheric dispersion from the different delays in the L1 and L2 frequencies, and apply a more precise correction. This can be done in civilian receivers without decrypting the P(Y) signal carried on L2, by tracking the carrier wave instead of the modulated code. To facilitate this on lower cost receivers, a new civilian code signal on L2, called L2C, was added to the Block IIR-M satellites, which was first launched in 2005. It allows a direct comparison of the L1 and L2 signals using the coded signal instead of the carrier wave.
The effects of the ionosphere generally change slowly, and can be averaged over time. Those for any particular geographical area can be easily calculated by comparing the GPS-measured position to a known surveyed location. This correction is also valid for other receivers in the same general location. Several systems send this information over radio or other links to allow L1-only receivers to make ionospheric corrections. The ionospheric data are transmitted via satellite in Satellite Based Augmentation Systems (SBAS) such as Wide Area Augmentation System (WAAS) (available in North America and Hawaii), EGNOS (Europe and Asia), Multi-functional Satellite Augmentation System (MSAS) (Japan), and GPS Aided Geo Augmented Navigation (GAGAN) (India) which transmits it on the GPS frequency using a special pseudo-random noise sequence (PRN), so only one receiver and antenna are required.
Humidity also causes a variable delay, resulting in errors similar to ionospheric delay, but occurring in the troposphere. This effect is more localized than ionospheric effects, changes more quickly and is not frequency dependent. These traits make precise measurement and compensation of humidity errors more difficult than ionospheric effects.[2]
The Atmospheric pressure can also change the signals reception delay, due to the dry gases present at the troposphere (78% N2, 21% O2, 0.9% Ar...). Its effect varies with local temperature and atmospheric pressure in quite a predictable manner using the laws of the ideal gases.[3]
Multipath effects
GPS signals can also be affected by multipath issues, where the radio signals reflect off surrounding terrain; buildings, canyon walls, hard ground, etc. These delayed signals cause measurement errors that are different for each type of GPS signal due to its dependency on the wavelength.[4]
A variety of techniques, most notably narrow correlator spacing, have been developed to mitigate multipath errors. For long delay multipath, the receiver itself can recognize the wayward signal and discard it. To address shorter delay multipath from the signal reflecting off the ground, specialized antennas (e.g., a choke ring antenna) may be used to reduce the signal power as received by the antenna. Short delay reflections are harder to filter out because they interfere with the true signal, causing effects almost indistinguishable from routine fluctuations in atmospheric delay.
Multipath effects are much less severe in moving vehicles. When the GPS antenna is moving, the false solutions using reflected signals quickly fail to converge and only the direct signals result in stable solutions.
Ephemeris and clock errors
While the ephemeris data is transmitted every 30 seconds, the information itself may be up to two hours old. Variability in solar radiation pressure[5] has an indirect effect on GPS accuracy due to its effect on ephemeris errors. If a fast time to first fix (TTFF) is needed, it is possible to upload a valid ephemeris to a receiver, and in addition to setting the time, a position fix can be obtained in under ten seconds. It is feasible to put such ephemeris data on the web so it can be loaded into mobile GPS devices.[6] See also Assisted GPS.
The satellites' atomic clocks experience noise and clock drift errors. The navigation message contains corrections for these errors and estimates of the accuracy of the atomic clock. However, they are based on observations and may not indicate the clock's current state.
These problems tend to be very small, but may add up to a few meters (tens of feet) of inaccuracy.[7]
For very precise positioning (e.g., in geodesy), these effects can be eliminated by differential GPS: the simultaneous use of two or more receivers at several survey points. In the 1990s when receivers were quite expensive, some methods of quasi-differential GPS were developed, using only one receiver but reoccupation of measuring points. At the TU Vienna the method was named qGPS and post processing software was developed.
Geometric dilution of precision computation (GDOP)
Computation of geometric dilution of precision
The concept of geometric dilution of precision was introduced in the section, error sources and analysis. Computations were provided to show how PDOP was used and how it affected the receiver position error standard deviation.
When visible GPS satellites are close together in the sky (i.e., small angular separation), the DOP values are high; when far apart, the DOP values are low. Conceptually, satellites that are close together cannot provide as much information as satellites that are widely separated. Low DOP values represent a better GPS positional accuracy due to the wider angular separation between the satellites used to calculate GPS receiver position. HDOP, VDOP, PDOP and TDOP are respectively Horizontal, Vertical, Position (3-D) and Time Dilution of Precision.
Figure 3.1 Dilution of Precision of Navstar GPS data from the U.S. Coast Guard provide a graphical indication of how geometry affect accuracy.[8]
We now take on the task of how to compute the dilution of precision terms. As a first step in computing DOP, consider the unit vector from the receiver to satellite i with components , , and where the distance from receiver to the satellite, , is given by:





where and denote the position of the receiver and and denote the position of satellite i. These x, y, and z components may be components in a North, East, Down coordinate system a South, East, Up coordinate system or other convenient system. Formulate the matrix A as:





The first three elements of each row of A are the components of a unit vector from the receiver to the indicated satellite. The elements in the fourth column are c where c denotes the speed of light. Formulate the matrix, Q, as

This computation is in accordance with Chapter 11 of The global positioning system by Parkinson and Spilker where the weighting matrix, P, has been set to the identity matrix. The elements of the Q matrix are designated as:[9]

The Greek letter is used quite often where we have used d. However the elements of the Q matrix do not represent variances and covariances as they are defined in probability and statistics. Instead they are strictly geometric terms. Therefore, d as in dilution of precision is used. PDOP, TDOP and GDOP are given by


in agreement with "Section 1.4.9 of PRINCIPLES OF SATELLITE POSITIONING".
The horizontal dilution of precision, , and the vertical dilution of precision, , are both dependent on the coordinate system used. To correspond to the local horizon plane and the local vertical, x, y, and z should denote positions in either a North, East, Down coordinate system or a South, East, Up coordinate system.


Derivation of equations for computing geometric dilution of precision
The equations for computing the geometric dilution of precision terms have been described in the previous section. This section describes the derivation of these equations. The method used here is similar to that used in "Global Positioning System (preview) by Parkinson and Spiker"
Consider the position error vector, , defined as the vector from the intersection of the four sphere surfaces corresponding to the pseudoranges to the true position of the receiver. where bold denotes a vector and , , and denote unit vectors along the x, y, and z axes respectively. Let denote the time error, the true time minus the receiver indicated time. Assume that the mean value of the three components of and are zero.







where , , , and are the errors in pseudoranges 1 through 4 respectively. This equation comes from linearizing the Newton-Raphson equation relating pseudoranges to receiver position, satellite positions, and receiver clock errors. Multiplying both sides by there results





- .

Transposing both sides:
- .

Post multiplying the matrices on both sides of equation (2) by the corresponding matrices in equation (3), there results
- .

Taking the expected value of both sides and taking the non-random matrices outside the expectation operator, E, there results:

Assuming the pseudorange errors are uncorrelated and have the same variance, the covariance matrix on the right side can be expressed as a scalar times the identity matrix. Thus

since

Note: since


Substituting for there follows


From equation (7), it follows that the variances of indicated receiver position and time are
- and


The remaining position and time error variance terms follow in a straightforward manner.
Selective availability
GPS included a (currently disabled) feature called Selective Availability (SA) that adds intentional, time varying errors of up to 100 meters (328 ft) to the publicly available navigation signals. This was intended to deny an enemy the use of civilian GPS receivers for precision weapon guidance.
SA errors are actually pseudorandom, generated by a cryptographic algorithm from a classified seed key available only to authorized users (the U.S. military, its allies and a few other users, mostly government) with a special military GPS receiver. Mere possession of the receiver is insufficient; it still needs the tightly controlled daily key.
Before it was turned off on May 2, 2000, typical SA errors were about 50 m (164 ft) horizontally and about 100 m (328 ft) vertically.[10] Because SA affects every GPS receiver in a given area almost equally, a fixed station with an accurately known position can measure the SA error values and transmit them to the local GPS receivers so they may correct their position fixes. This is called Differential GPS or DGPS. DGPS also corrects for several other important sources of GPS errors, particularly ionospheric delay, so it continues to be widely used even though SA has been turned off. The ineffectiveness of SA in the face of widely available DGPS was a common argument for turning off SA, and this was finally done by order of President Clinton in 2000.[11]
DGPS services are widely available from both commercial and government sources. The latter include WAAS and the U.S. Coast Guard's network of LF marine navigation beacons. The accuracy of the corrections depends on the distance between the user and the DGPS receiver. As the distance increases, the errors at the two sites will not correlate as well, resulting in less precise differential corrections.
During the 1990–91 Gulf War, the shortage of military GPS units caused many troops and their families to buy readily available civilian units. Selective Availability significantly impeded the U.S. military's own battlefield use of these GPS, so the military made the decision to turn it off for the duration of the war.
In the 1990s, the FAA started pressuring the military to turn off SA permanently. This would save the FAA millions of dollars every year in maintenance of their own radio navigation systems. The amount of error added was "set to zero"[12] at midnight on May 1, 2000 following an announcement by U.S. President Bill Clinton, allowing users access to the error-free L1 signal. Per the directive, the induced error of SA was changed to add no error to the public signals (C/A code). Clinton's executive order required SA to be set to zero by 2006; it happened in 2000 once the U.S. military developed a new system that provides the ability to deny GPS (and other navigation services) to hostile forces in a specific area of crisis without affecting the rest of the world or its own military systems.[12]
On 19 September 2007, the United States Department of Defense announced that future GPS III satellites will not be capable of implementing SA,[13] eventually making the policy permanent.[14]
Anti-spoofing
Another restriction on GPS, antispoofing, remains on. This encrypts the P-code so that it cannot be mimicked by a transmitter sending false information. Few civilian receivers have ever used the P-code, and the accuracy attainable with the public C/A code was much better than originally expected (especially with DGPS), so much so that the antispoof policy has relatively little effect on most civilian users. Turning off antispoof would primarily benefit surveyors and some scientists who need extremely precise positions for experiments such as tracking tectonic plate motion.
Relativity
A number of sources of error exist due to relativistic effects[15] that would render the system useless if uncorrected. Three relativistic effects are the time dilation, gravitational frequency shift, and eccentricity effects. Examples include the relativistic time slowing due to the speed of the satellite of about 1 part in 1010, the gravitational time dilation that makes a satellite run about 5 parts in 1010 faster than an Earth-based clock, and the Sagnac effect due to rotation relative to receivers on Earth. These topics are examined below, one at a time.
Special and general relativity
According to the theory of relativity, due to their constant movement and height relative to the Earth-centered, non-rotating approximately inertial reference frame, the clocks on the satellites are affected by their speed. Special relativity predicts that the frequency of the atomic clocks moving at GPS orbital speeds will tick more slowly than stationary ground clocks by a factor of , or result in a delay of about 7 μs/day, where the orbital velocity is v = 4 km/s, and c = the speed of light. This time dilation effect has been measured and verified using the GPS.

The effect of gravitational frequency shift on the GPS due to general relativity is that a clock closer to a massive object will be slower than a clock farther away. Applied to the GPS, the receivers are much closer to Earth than the satellites, causing the GPS clocks to be faster by a factor of 5×10−10, or about 45.9 μs/day. This gravitational frequency shift is noticeable.
When combining the time dilation and gravitational frequency shift, the discrepancy is about 38 microseconds per day, a difference of 4.465 parts in 1010.[16] Without correction, errors of roughly 11.4 km/day would accumulate in the position.[17] This initial pseudorange error is corrected in the process of solving the navigation equations. In addition the elliptical, rather than perfectly circular, satellite orbits cause the time dilation and gravitational frequency shift effects to vary with time. This eccentricity effect causes the clock rate difference between a GPS satellite and a receiver to increase or decrease depending on the altitude of the satellite.
To compensate for the discrepancy, the frequency standard on board each satellite is given a rate offset prior to launch, making it run slightly slower than the desired frequency on Earth; specifically, at 10.22999999543 MHz instead of 10.23 MHz.[18] Since the atomic clocks on board the GPS satellites are precisely tuned, it makes the system a practical engineering application of the scientific theory of relativity in a real-world environment.[19] Placing atomic clocks on artificial satellites to test Einstein's general theory was proposed by Friedwardt Winterberg in 1955.[20]
Calculation of time dilation
To calculate the amount of daily time dilation experienced by GPS satellites relative to Earth we need to separately determine the amounts due to special relativity (velocity) and general relativity (gravity) and add them together.
The amount due to velocity will be determined using the Lorentz transformation. This will be:

For small values of v/c, by using binomial expansion this approximates to:

The GPS satellites move at 3874 m/s relative to Earth's center.[18] We thus determine:

This difference below 1 of 8.349×10−11 represents the fraction by which the satellites' clocks move slower than Earth's. It is then multiplied by the number of nanoseconds in a day:

That is, the satellites' clocks lose 7,214 nanoseconds a day due to special relativity effects.
- Note that this speed of 3874 m/s is measured relative to Earth's center rather than its surface where the GPS receivers (and users) are. This is because Earth's equipotential makes net time dilation equal across its geodesic surface.[21] That is, the combination of Special and General effects make the net time dilation at the equator equal to that of the poles, which in turn are at rest relative to the center. Hence we use the center as a reference point to represent the entire surface.
The amount of dilation due to gravity will be determined using the gravitational time dilation equation:

For small values of M/r, by using binomial expansion this approximates to:

We are again only interested in the fraction below 1, and in the difference between Earth and the satellites. To determine this difference we take:

Earth has a radius of 6,357 km (at the poles) making Rearth = 6,357,000 m and the satellites have an altitude of 20,184 km[18] making their orbit radius Rgps = 26,541,000 m. Substituting these in the above equation, with Mearth = 5.974×1024, G = 6.674×10−11, and c = 2.998×108 (all in SI units), gives:

This represents the fraction by which the satellites' clocks move faster than Earth's. It is then multiplied by the number of nanoseconds in a day:

That is, the satellites' clocks gain 45,850 nanoseconds a day due to general relativity effects. These effects are added together to give (rounded to 10 ns):
- 45850 – 7210 = 38640 ns
Hence the satellites' clocks gain approximately 38,640 nanoseconds a day or 38.6 μs per day due to relativity effects in total.
In order to compensate for this gain, a GPS clock's frequency needs to be slowed by the fraction:
- 5.307×10−10 – 8.349×10−11 = 4.472×10−10
This fraction is subtracted from 1 and multiplied by the pre-adjusted clock frequency of 10.23 MHz:
- (1 – 4.472×10−10) × 10.23 = 10.22999999543
That is, we need to slow the clocks down from 10.23 MHz to 10.22999999543 MHz in order to negate the effects of relativity.
Sagnac distortion
GPS observation processing must also compensate for the Sagnac effect. The GPS time scale is defined in an inertial system but observations are processed in an Earth-centered, Earth-fixed (co-rotating) system, a system in which simultaneity is not uniquely defined. A coordinate transformation is thus applied to convert from the inertial system to the ECEF system. The resulting signal run time correction has opposite algebraic signs for satellites in the Eastern and Western celestial hemispheres. Ignoring this effect will produce an east–west error on the order of hundreds of nanoseconds, or tens of meters in position.[22]
Natural sources of interference
Since GPS signals at terrestrial receivers tend to be relatively weak, natural radio signals or scattering of the GPS signals can desensitize the receiver, making acquiring and tracking the satellite signals difficult or impossible.
Space weather degrades GPS operation in two ways, direct interference by solar radio burst noise in the same frequency band[23] or by scattering of the GPS radio signal in ionospheric irregularities referred to as scintillation.[24] Both forms of degradation follow the 11 year solar cycle and are a maximum at sunspot maximum although they can occur at any time. Solar radio bursts are associated with solar flares and coronal mass ejections (CMEs)[25] and their impact can affect reception over the half of the Earth facing the sun. Scintillation occurs most frequently at tropical latitudes where it is a night time phenomenon. It occurs less frequently at high latitudes or mid-latitudes where magnetic storms can lead to scintillation.[26] In addition to producing scintillation, magnetic storms can produce strong ionospheric gradients that degrade the accuracy of SBAS systems.[27]
Artificial sources of interference
In automotive GPS receivers, metallic features in windshields,[28] such as defrosters, or car window tinting films[29] can act as a Faraday cage, degrading reception just inside the car.
Man-made EMI (electromagnetic interference) can also disrupt or jam GPS signals. In one well-documented case it was impossible to receive GPS signals in the entire harbor of Moss Landing, California due to unintentional jamming caused by malfunctioning TV antenna preamplifiers.[30][31] Intentional jamming is also possible. Generally, stronger signals can interfere with GPS receivers when they are within radio range or line of sight. In 2002 a detailed description of how to build a short-range GPS L1 C/A jammer was published in the online magazine Phrack.[32]
The U.S. government believes that such jammers were used occasionally during the War in Afghanistan, and the U.S. military claims to have destroyed six GPS jammers during the Iraq War, including one that was destroyed with a GPS-guided bomb.[33] A GPS jammer is relatively easy to detect and locate, making it an attractive target for anti-radiation missiles. The UK Ministry of Defence tested a jamming system in the UK's West Country on 7 and 8 June 2007.
Some countries allow the use of GPS repeaters to allow the reception of GPS signals indoors and in obscured locations; while in other countries these are prohibited as the retransmitted signals can cause multi-path interference to other GPS receivers that receive data from both GPS satellites and the repeater. In the UK Ofcom now permits the use of GPS/GNSS Repeaters[34] under a 'light licensing' regime.
Due to the potential for both natural and man-made noise, numerous techniques continue to be developed to deal with the interference. The first is to not rely on GPS as a sole source. According to John Ruley, "IFR pilots should have a fallback plan in case of a GPS malfunction".[35] Receiver Autonomous Integrity Monitoring (RAIM) is a feature included in some receivers, designed to provide a warning to the user if jamming or another problem is detected. The U.S. military has also deployed since 2004 their Selective Availability / Anti-Spoofing Module (SAASM) in the Defense Advanced GPS Receiver (DAGR).[36] In demonstration videos the DAGR was shown to detect jamming and maintain its lock on the encrypted GPS signals during interference which caused civilian receivers to lose lock.
See also
- GPS augmentation
Notes
- The same principle, and the math behind it, can be found in descriptions of pulsar timing by astronomers.
- Navipedia: Troposphere Monitoring
- Navipedia: Tropospheric Delay
- Navipedia: Multipath
- IPN Progress Report 42-159 (2004)
- SNT080408. "Ephemeris Server Example". Tdc.co.uk. Archived from the original on January 12, 2009. Retrieved 2009-10-13.
- "Unit 1 – Introduction to GPS". Archived from the original on April 29, 2009.
- "NAVSTAR GPS User Equipment Introduction" (PDF). US Coast guard navigation center. US Coast Guard. September 1996. Retrieved July 5, 2014.
- Parkinson (1996)
- Grewal (2001), p. 103.
- "President Clinton Orders the Cessation of GPS Selective Availability".
- "Statement by the President regarding the United States' Decision to Stop Degrading Global Positioning System Accuracy". Federal Aviation Administration. May 1, 2000. Retrieved 2013-01-04.
- "DoD Permanently Discontinues Procurement Of Global Positioning System Selective Availability". DefenseLink. September 18, 2007. Archived from the original on February 18, 2008. Retrieved 2008-02-20.
- "Selective Availability". National space-based Positioning, Navigation, and Timing Executive Committee. Archived from the original on January 13, 2008. Retrieved 2008-02-20.
- Webb (2004), p. 32.
- Rizos, Chris. University of New South Wales. GPS Satellite Signals Archived 2010-06-12 at the Wayback Machine. 1999.
- Faraoni, Valerio (2013). Special Relativity (illustrated ed.). Springer Science & Business Media. p. 54. ISBN 978-3-319-01107-3. Extract of page 54
- The Global Positioning System by Robert A. Nelson Via Satellite, November 1999
- Pogge, Richard W.; "Real-World Relativity: The GPS Navigation System". Retrieved 25 January 2008.
- "Astronautica Acta II, 25 (1956)". 1956-08-10. Retrieved 2009-10-23.
- S. P. Drake (January 2006). "The equivalence principle as a stepping stone from special to general relativity" (PDF). Am. J. Phys., Vol. 74, No. 1. pp. 22–25.
- Ashby, Neil Relativity and GPS. Physics Today, May 2002.
- Cerruti, A., P. M. Kintner, D. E. Gary, A. J. Mannucci, R. F. Meyer, P. H. Doherty, and A. J. Coster (2008), Effect of intense December 2006 solar radio bursts on GPS receivers, Space Weather, doi:10.1029/2007SW000375, October 19, 2008
- Aarons, Jules; Basu, Santimay (1994). "Ionospheric amplitude and phase fluctuations at the GPS frequencies". Proceedings of ION GPS. 2: 1569–1578.
- S. Mancuso and J. C. Raymond, "Coronal transients and metric type II radio bursts. I. Effects of geometry, 2004, Astronomy and Astrophysics, v.413, p.363-371'
- Ledvina, B. M.; J. J. Makela & P. M. Kintner (2002). "First observations of intense GPS L1 amplitude scintillations at midlatitude". Geophysical Research Letters. 29 (14): 1659. Bibcode:2002GeoRL..29.1659L. doi:10.1029/2002GL014770.
- Tom Diehl, Solar Flares Hit the Earth- WAAS Bends but Does Not Break, SatNav News, volume 23, June 2004.
- "I-PASS Mounting for Vehicles with Special Windshield Features" (PDF). Archived from the original (PDF) on March 26, 2010.
- "3M Automotive Films".. Note that the 'Color Stable' films are specifically described as not interfering with satellite signals.
- "The Hunt for RFI". GPS World. 1 January 2003.
- "EMC compliance club "banana skins" column 222". Compliance-club.com. Retrieved 2009-10-13.
- Low Cost and Portable GPS Jammer. Phrack issue 0x3c (60), article 13. Published December 28, 2002.
- American Forces Press Service. Centcom charts progress. March 25, 2003. Archived December 3, 2009, at the Wayback Machine
- Ofcom Statement on Authorisation regime for GNSS repeaters
- Ruley, John. AVweb. GPS jamming. February 12, 2003.
- US Army DAGR page Archived 2012-08-05 at Archive.today
References
- Grewal, Mohinder S.; Weill, Lawrence Randolph; Andrews, Angus P. (2001). Global positioning systems, inertial navigation, and integration. John Wiley and Sons. ISBN 978-0-47135-032-3.
- Parkinson; Spilker (1996). The global positioning system. American Institute of Aeronautics & Astronomy. ISBN 978-1-56347-106-3.
- Webb, Stephen (2004). Out of this world: colliding universes, branes, strings, and other wild ideas of modern physics. Springer. ISBN 0-387-02930-3. Retrieved 2013-08-16.
External links
| Wikimedia Commons has media related to Global Positioning System. |
- GPS.gov—General public education website created by the U.S. Government
- GPS SPS Performance Standard—The official Standard Positioning Service specification (2008 version).
- GPS SPS Performance Standard—The official Standard Positioning Service specification (2001 version).