Topological space
In topology and related branches of mathematics, a topological space may be defined as a set of points, along with a set of neighbourhoods for each point, satisfying a set of axioms relating points and neighbourhoods. The definition of a topological space relies only upon set theory and is the most general notion of a mathematical space that allows for the definition of concepts such as continuity, connectedness, and convergence.[1] Other spaces, such as manifolds and metric spaces, are specializations of topological spaces with extra structures or constraints. Being so general, topological spaces are a central unifying notion and appear in virtually every branch of modern mathematics. The branch of mathematics that studies topological spaces in their own right is called point-set topology or general topology.
History
Around 1735, Euler discovered the formula relating the number of vertices, edges and faces of a convex polyhedron, and hence of a planar graph. The study and generalization of this formula, specifically by Cauchy and L'Huilier, is at the origin of topology. In 1827, Carl Friedrich Gauss published General investigations of curved surfaces which in section 3 defines the curved surface in a similar manner to the modern topological understanding: "A curved surface is said to possess continuous curvature at one of its points A, if the direction of all the straight lines drawn from A to points of the surface at an infinitely small distance from A are deflected infinitely little from one and the same plane passing through A."[2]

Yet, "until Riemann’s work in the early 1850s, surfaces were always dealt with from a local point of view (as parametric surfaces) and topological issues were never considered."[3] "Möbius and Jordan seem to be the first to realize that the main problem about the topology of (compact) surfaces is to find invariants (preferably numerical) to decide the equivalence of surfaces, that is, to decide whether two surfaces are homeomorphic or not."[3]
The subject is clearly defined by Felix Klein in his "Erlangen Program" (1872): the geometry invariants of arbitrary continuous transformation, a kind of geometry. The term "topology" was introduced by Johann Benedict Listing in 1847, although he had used the term in correspondence some years earlier instead of previously used "Analysis situs". The foundation of this science, for a space of any dimension, was created by Poincaré. His first article on this topic appeared in 1894.[4] In the 1930s, James Waddell Alexander II and Hassler Whitney first expressed the idea that a surface is a topological space that is locally like a Euclidean plane.
Definitions
The utility of the notion of a topology is shown by the fact that there are several equivalent definitions of this structure. Thus one chooses the axiomatisation suited for the application. The most commonly used is that in terms of open sets, but perhaps more intuitive is that in terms of neighbourhoods and so this is given first.
Definition via neighbourhoods
This axiomatization is due to Felix Hausdorff. Let X be a set; the elements of X are usually called points, though they can be any mathematical object. We allow X to be empty. Let N be a function assigning to each x (point) in X a non-empty collection N(x) of subsets of X. The elements of N(x) will be called neighbourhoods of x with respect to N (or, simply, neighbourhoods of x). The function N is called a neighbourhood topology if the axioms below[5] are satisfied; and then X with N is called a topological space.
- If N is a neighbourhood of x (i.e., N ∈ N(x)), then x ∈ N. In other words, each point belongs to every one of its neighbourhoods.
- If N is a subset of X and includes a neighbourhood of x, then N is a neighbourhood of x. I.e., every superset of a neighbourhood of a point x in X is again a neighbourhood of x.
- The intersection of two neighbourhoods of x is a neighbourhood of x.
- Any neighbourhood N of x includes a neighbourhood M of x such that N is a neighbourhood of each point of M.
The first three axioms for neighbourhoods have a clear meaning. The fourth axiom has a very important use in the structure of the theory, that of linking together the neighbourhoods of different points of X.
A standard example of such a system of neighbourhoods is for the real line R, where a subset N of R is defined to be a neighbourhood of a real number x if it includes an open interval containing x.
Given such a structure, a subset U of X is defined to be open if U is a neighbourhood of all points in U. The open sets then satisfy the axioms given below. Conversely, when given the open sets of a topological space, the neighbourhoods satisfying the above axioms can be recovered by defining N to be a neighbourhood of x if N includes an open set U such that x ∈ U.[6]
Definition via open sets
A topological space is an ordered pair (X, τ), where X is a set and τ is a collection of subsets of X, satisfying the following axioms:[7]
- The empty set and X itself belong to τ.
- Any arbitrary (finite or infinite) union of members of τ still belongs to τ.
- The intersection of any finite number of members of τ still belongs to τ.
The elements of τ are called open sets and the collection τ is called a topology on X.
Examples
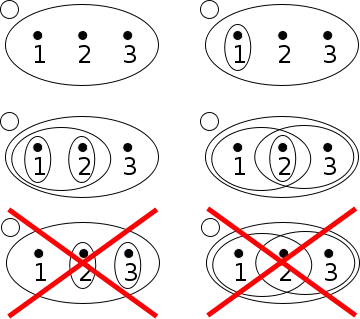
- Given X = {1, 2, 3, 4}, the collection τ = {{}, {1, 2, 3, 4}} of only the two subsets of X required by the axioms forms a topology of X, the trivial topology (indiscrete topology).
- Given X = {1, 2, 3, 4}, the collection τ = {{}, {2}, {1, 2}, {2, 3}, {1, 2, 3}, {1, 2, 3, 4}} of six subsets of X forms another topology of X.
- Given X = {1, 2, 3, 4} and the collection τ = P(X) (the power set of X), (X, τ) is a topological space. τ is called the discrete topology.
- Given X = Z, the set of integers, the collection τ of all finite subsets of the integers plus Z itself is not a topology, because (for example) the union of all finite sets not containing zero is not finite but is also not all of Z, and so it cannot be in τ.
Definition via closed sets
Using de Morgan's laws, the above axioms defining open sets become axioms defining closed sets:
- The empty set and X are closed.
- The intersection of any collection of closed sets is also closed.
- The union of any finite number of closed sets is also closed.
Using these axioms, another way to define a topological space is as a set X together with a collection τ of closed subsets of X. Thus the sets in the topology τ are the closed sets, and their complements in X are the open sets.
Other definitions
There are many other equivalent ways to define a topological space: in other words the concepts of neighbourhood, or that of open or closed sets can be reconstructed from other starting points and satisfy the correct axioms.
Another way to define a topological space is by using the Kuratowski closure axioms, which define the closed sets as the fixed points of an operator on the power set of X.
A net is a generalisation of the concept of sequence. A topology is completely determined if for every net in X the set of its accumulation points is specified.
Comparison of topologies
A variety of topologies can be placed on a set to form a topological space. When every set in a topology τ1 is also in a topology τ2 and τ1 is a subset of τ2, we say that τ2 is finer than τ1, and τ1 is coarser than τ2. A proof that relies only on the existence of certain open sets will also hold for any finer topology, and similarly a proof that relies only on certain sets not being open applies to any coarser topology. The terms larger and smaller are sometimes used in place of finer and coarser, respectively. The terms stronger and weaker are also used in the literature, but with little agreement on the meaning, so one should always be sure of an author's convention when reading.
The collection of all topologies on a given fixed set X forms a complete lattice: if F = {τα | α ∈ A} is a collection of topologies on X, then the meet of F is the intersection of F, and the join of F is the meet of the collection of all topologies on X that contain every member of F.
Continuous functions
A function f : X → Y between topological spaces is called continuous if for every x in X and every neighbourhood N of f(x) there is a neighbourhood M of x such that f(M) ⊆ N. This relates easily to the usual definition in analysis. Equivalently, f is continuous if the inverse image of every open set is open.[8] This is an attempt to capture the intuition that there are no "jumps" or "separations" in the function. A homeomorphism is a bijection that is continuous and whose inverse is also continuous. Two spaces are called homeomorphic if there exists a homeomorphism between them. From the standpoint of topology, homeomorphic spaces are essentially identical.[9]
In category theory, Top, the category of topological spaces with topological spaces as objects and continuous functions as morphisms, is one of the fundamental categories. The attempt to classify the objects of this category (up to homeomorphism) by invariants has motivated areas of research, such as homotopy theory, homology theory, and K-theory.
Examples of topological spaces
A given set may have many different topologies. If a set is given a different topology, it is viewed as a different topological space. Any set can be given the discrete topology in which every subset is open. The only convergent sequences or nets in this topology are those that are eventually constant. Also, any set can be given the trivial topology (also called the indiscrete topology), in which only the empty set and the whole space are open. Every sequence and net in this topology converges to every point of the space. This example shows that in general topological spaces, limits of sequences need not be unique. However, often topological spaces must be Hausdorff spaces where limit points are unique.
Metric spaces
Metric spaces embody a metric, a precise notion of distance between points.
Every metric space can be given a metric topology, in which the basic open sets are open balls defined by the metric. This is the standard topology on any normed vector space. On a finite-dimensional vector space this topology is the same for all norms.
There are many ways of defining a topology on R, the set of real numbers. The standard topology on R is generated by the open intervals. The set of all open intervals forms a base or basis for the topology, meaning that every open set is a union of some collection of sets from the base. In particular, this means that a set is open if there exists an open interval of non zero radius about every point in the set. More generally, the Euclidean spaces Rn can be given a topology. In the usual topology on Rn the basic open sets are the open balls. Similarly, C, the set of complex numbers, and Cn have a standard topology in which the basic open sets are open balls.
Proximity spaces
Proximity spaces provide a notion of closeness of two sets.
Uniform spaces
Uniform spaces axiomatize ordering the distance between distinct points.
Function spaces
A topological space in which the points are functions is called a function space.
Cauchy spaces
Cauchy spaces axiomatize the ability to test whether a net is Cauchy. Cauchy spaces provide a general setting for studying completions.
Convergence spaces
Convergence spaces capture some of the features of convergence of filters.
Grothendieck sites
Grothendieck sites are categories with additional data axiomatizing whether a family of arrows covers an object. Sites are a general setting for defining sheaves.
Other spaces
If Γ is a filter on a set X then { ∅ } ∪ Γ is a topology on X.
Many sets of linear operators in functional analysis are endowed with topologies that are defined by specifying when a particular sequence of functions converges to the zero function.
Any local field has a topology native to it, and this can be extended to vector spaces over that field.
Every manifold has a natural topology since it is locally Euclidean. Similarly, every simplex and every simplicial complex inherits a natural topology from Rn.
The Zariski topology is defined algebraically on the spectrum of a ring or an algebraic variety. On Rn or Cn, the closed sets of the Zariski topology are the solution sets of systems of polynomial equations.
A linear graph has a natural topology that generalises many of the geometric aspects of graphs with vertices and edges.
The Sierpiński space is the simplest non-discrete topological space. It has important relations to the theory of computation and semantics.
There exist numerous topologies on any given finite set. Such spaces are called finite topological spaces. Finite spaces are sometimes used to provide examples or counterexamples to conjectures about topological spaces in general.
Any set can be given the cofinite topology in which the open sets are the empty set and the sets whose complement is finite. This is the smallest T1 topology on any infinite set.
Any set can be given the cocountable topology, in which a set is defined as open if it is either empty or its complement is countable. When the set is uncountable, this topology serves as a counterexample in many situations.
The real line can also be given the lower limit topology. Here, the basic open sets are the half open intervals [a, b). This topology on R is strictly finer than the Euclidean topology defined above; a sequence converges to a point in this topology if and only if it converges from above in the Euclidean topology. This example shows that a set may have many distinct topologies defined on it.
If Γ is an ordinal number, then the set Γ = [0, Γ) may be endowed with the order topology generated by the intervals (a, b), [0, b) and (a, Γ) where a and b are elements of Γ.
Outer space of a free group Fn consists of the so-called "marked metric graph structures" of volume 1 on Fn.[10]
Topological constructions
Every subset of a topological space can be given the subspace topology in which the open sets are the intersections of the open sets of the larger space with the subset. For any indexed family of topological spaces, the product can be given the product topology, which is generated by the inverse images of open sets of the factors under the projection mappings. For example, in finite products, a basis for the product topology consists of all products of open sets. For infinite products, there is the additional requirement that in a basic open set, all but finitely many of its projections are the entire space.
A quotient space is defined as follows: if X is a topological space and Y is a set, and if f : X→ Y is a surjective function, then the quotient topology on Y is the collection of subsets of Y that have open inverse images under f. In other words, the quotient topology is the finest topology on Y for which f is continuous. A common example of a quotient topology is when an equivalence relation is defined on the topological space X. The map f is then the natural projection onto the set of equivalence classes.
The Vietoris topology on the set of all non-empty subsets of a topological space X, named for Leopold Vietoris, is generated by the following basis: for every n-tuple U1, ..., Un of open sets in X, we construct a basis set consisting of all subsets of the union of the Ui that have non-empty intersections with each Ui.
The Fell topology on the set of all non-empty closed subsets of a locally compact Polish space X is a variant of the Vietoris topology, and is named after mathematician James Fell. It is generated by the following basis: for every n-tuple U1, ..., Un of open sets in X and for every compact set K, the set of all subsets of X that are disjoint from K and have nonempty intersections with each Ui is a member of the basis.
Classification of topological spaces
Topological spaces can be broadly classified, up to homeomorphism, by their topological properties. A topological property is a property of spaces that is invariant under homeomorphisms. To prove that two spaces are not homeomorphic it is sufficient to find a topological property not shared by them. Examples of such properties include connectedness, compactness, and various separation axioms. For algebraic invariants see algebraic topology.
Topological spaces with algebraic structure
For any algebraic objects we can introduce the discrete topology, under which the algebraic operations are continuous functions. For any such structure that is not finite, we often have a natural topology compatible with the algebraic operations, in the sense that the algebraic operations are still continuous. This leads to concepts such as topological groups, topological vector spaces, topological rings and local fields.
Topological spaces with order structure
- Spectral. A space is spectral if and only if it is the prime spectrum of a ring (Hochster theorem).
- Specialization preorder. In a space the specialization (or canonical) preorder is defined by x ≤ y if and only if cl{x} ⊆ cl{y}.
See also
- Characterizations of the category of topological spaces
- Complete Heyting algebra – The system of all open sets of a given topological space ordered by inclusion is a complete Heyting algebra.
- Convergence space
- Hemicontinuity
- Quasitopological space
- Space (mathematics)
Notes
- Schubert 1968, p. 13
- Gauss 1827.
- Gallier & Xu 2013.
- J. Stillwell, Mathematics and its history
- Brown 2006, section 2.1.
- Brown 2006, section 2.2.
- Armstrong 1983, definition 2.1.
- Armstrong 1983, theorem 2.6.
- Munkres, James R (2015). Topology. pp. 317–319. ISBN 978-93-325-4953-1.
- Culler, Marc; Vogtmann, Karen (1986). "Moduli of graphs and automorphisms of free groups" (PDF). Inventiones Mathematicae. 84 (1): 91–119. doi:10.1007/BF01388734.
References
- Armstrong, M. A. (1983) [1979]. Basic Topology. Undergraduate Texts in Mathematics. Springer. ISBN 0-387-90839-0.
- Bredon, Glen E., Topology and Geometry (Graduate Texts in Mathematics), Springer; 1st edition (October 17, 1997). ISBN 0-387-97926-3.
- Bourbaki, Nicolas; Elements of Mathematics: General Topology, Addison-Wesley (1966).
- Brown, Ronald (2006). Topology and Groupoids. Booksurge. ISBN 1-4196-2722-8. (3rd edition of differently titled books)
- Čech, Eduard; Point Sets, Academic Press (1969).
- Fulton, William, Algebraic Topology, (Graduate Texts in Mathematics), Springer; 1st edition (September 5, 1997). ISBN 0-387-94327-7.
- Gallier, Jean; Xu, Dianna (2013). A Guide to the Classification Theorem for Compact Surfaces. Springer.
- Gauss, Carl Friedrich (1827). General investigations of curved surfaces.
- Lipschutz, Seymour; Schaum's Outline of General Topology, McGraw-Hill; 1st edition (June 1, 1968). ISBN 0-07-037988-2.
- Munkres, James; Topology, Prentice Hall; 2nd edition (December 28, 1999). ISBN 0-13-181629-2.
- Runde, Volker; A Taste of Topology (Universitext), Springer; 1st edition (July 6, 2005). ISBN 0-387-25790-X.
- Schubert, Horst (1968), Topology, Macdonald Technical & Scientific, ISBN 0-356-02077-0
- Steen, Lynn A. and Seebach, J. Arthur Jr.; Counterexamples in Topology, Holt, Rinehart and Winston (1970). ISBN 0-03-079485-4.
- Vaidyanathaswamy, R. (1960). Set Topology. Chelsea Publishing Co. ISBN 0486404560.
- Willard, Stephen (2004). General Topology. Dover Publications. ISBN 0-486-43479-6.
External links
| Wikiquote has quotations related to: Topological space |
- "Topological space", Encyclopedia of Mathematics, EMS Press, 2001 [1994]
| Fields |  | |
|---|---|---|
| Key concepts | ||
| ||
| Authority control |
|---|