Jason (ROV)
Jason is a two-body remotely operated vehicle (ROV) designed, built, and operated by the Woods Hole Oceanographic Institution (WHOI). Construction of Jason was completed and first launched in 1988 by WHOI’s Deep Submergence Laboratory, and was redesigned in 2002 as the second iteration.[1] The ROV allows scientists and explorers to have access to the seafloor without leaving the deck of a ship.
 A rear-view of Jason and the deployment arm on the R/V Atlantis in 2020 | |
| History | |
|---|---|
| Name: | Jason |
| Builder: | WHOI |
| General characteristics | |
| Tonnage: | 4.5 tons |
| Length: | 3.4 m (11 ft 2 in) |
| Beam: | 2.2 m (7 ft 3 in) |
| Height: | 2.4 m (7 ft 10 in) |
| Propulsion: | Six brushless DC thrusters each providing 250 lbf thrust |
| Speed: | 1.5 knot forward, 0.5 knot lateral, 1.0 knot vertical |
| Endurance: | theoretically indefinite |
| Test depth: | 6500 m |
| Sensors and processing systems: |
Attitude Two-axis clinometer, 0.1 degree resolution Heading Flux-gate compass, 0.1 degree resolution Gimballed gyro, 0.1 degree resolution Pressure Depth Bulk semiconductor strain gauge, 1m resolution Altitude 120kHz updating at 2Hz, 33 meters range, 0.1 m resolution |
| Notes: |
Video Two surface-selectable channels from the following: One single-CCD-chip color One three-CCD-chip color One single-CCD-chip black and white, aft looking Still Camera 35mm, 400 frames with either 16mm or 28mm lens Electronic Camera Marquest Model 9100 camera Lighting One 200 watt-second strobe One 300 or 600 watt-second strobe Three 250 watt incandescent lamps Two 400 watt HMI lights SImagenex 855 scanning sonar with forward imaging or profiling head Payload: 50 kg Umbilical: 35 meters, 18 mm diameter, neutrally buoyant Navigation Long base line responder or relay transmitter/receiver 7-12kHz vehicle powered or battery operated for emergency location |
As of 2020, Jason has completed 147 cruises with over 1200 dives and over 16,000 hours of dive time.[2]
Construction and Equipment
Jason's original commission was in 1988, with a deployment at Hood Canal in Washington state, USA. The first-generation of the ROV was involved in over 200 launches until its retirement in 2001.[1][2] The second-generation ROV, called the Jason II, had its sea trials in July of 2002 at Nubbin Seamount in the Cascadia basin.[2] In 2016, Jason was upgraded with a new frame, tether, recovery system, and skids that increased the payload by several thousand pounds.[1]
A 10-kilometer (6-mile) electro-optical-mechanical tether delivers electrical power and commands from the ship through Medea and down to Jason, which then returns data and live video imagery. Medea serves as a shock absorber, buffering Jason from the movements of the ship, while providing lighting and a bird’s eye view of the ROV during seafloor operations.[3]
Jason is equipped with sonar imaging as well as video, still, and electronic cameras and appropriate lighting gear. It carries precision navigation equipment and sensors for depth, vehicle attitude (tilt), and altitude from the seafloor. Jason's manipulator arms can collect samples that may be put in a small basket attached to the vehicle or, for heavier items, on an attached "elevator" platform that carries them to the surface.
Trivia
A prototype of Jason called Jason Jr. was used with Alvin to explore Titanic in 1986.[4] Jason Jr. was lost at sea in 1991.
Jason and Medea were named after the married characters of Greek mythology.[5]
Gallery
- Images of ROV Jason
 Jason arm samples fluid at the West Mata undersea volcano
Jason arm samples fluid at the West Mata undersea volcano The interior of the Jason Operations van in 2020
The interior of the Jason Operations van in 2020 Jason deploying at Axial Seamount in 2017
Jason deploying at Axial Seamount in 2017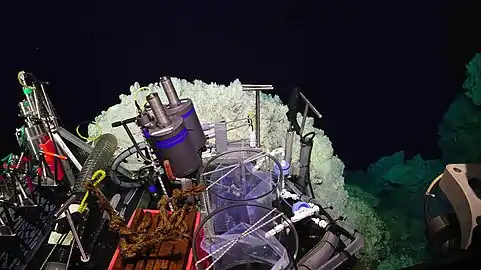 Jason's sampling basket, filled with scientific equipment
Jason's sampling basket, filled with scientific equipment.jpg.webp) A fish swims by Jason's manipulator arm
A fish swims by Jason's manipulator arm Medea on deck, the intermediate between Jason and the host research vessel
Medea on deck, the intermediate between Jason and the host research vessel
References
- US Department of Commerce, National Oceanic and Atmospheric Administration. "Remotely Operated Vehicle Jason/Medea: Technology: Submersibles: Vessels: NOAA Office of Ocean Exploration and Research". oceanexplorer.noaa.gov.
- "Dive Log – Jason". National Deep Submergence Facility.
- "Remotely Operated Vehicle Jason/Medea". NDSF Vehicles. WHOI. Retrieved 17 January 2012.
- Ballard, Robert (2008). Archaeological Oceanography. Princeton: Princeton University Press. pp. 102, 104. ISBN 978-0-691-12940-2.
- "ROV Jason/Medea - Woods Hole Oceanographic Institution". whoi.edu/.